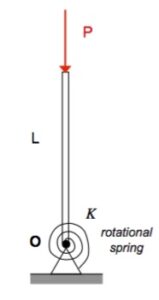
A model of a simple system that exhibits buckling is the rigid bar system presented in the lecture book with the bar pinned to ground at O, with a “rotational spring” of rotational stiffness K connecting the bar to ground. (Note: a rotational spring is a device that resists rotation with a generated moment of Kθ.) With the spring being unstressed at θ = 0, an axial load P is applied to the free end. The strength of the load is measured inversely by the parameter α = K/PL.
Observations
- The system can ALWAYS be in equilibrium at θ = 0 for any value of the loading parameter α.
- Analysis in the lecture book shows that for values of loading for which α < 1, a second equilibrium state (the “buckled” state) can exist.
- When this second equilibrium exists, the θ = 0 equilibrium state is UNSTABLE.
- An “unstable” equilibrium state is one for which the system can be remain at rest; however, if this state is given a small “bump”, the system moves from the undeformed state to the buckled state.

The following simulations show how “bumps” will result in different final equilibrium states for three different loadings. Recall that for α < 1, the system is unstable. The loadings on the left two structures correspond to stable loadings and allows the bar to return to the upright state, whereas the loading on the right (unstable) produces buckling where the structure collapses.