Discussion and hints:
The derivation of the dynamical equation of motion (EOM) for a system is a straight-forward application of what we have learned from Chapter 5 in using the Newton-Euler equations. The goal in deriving the EOM is to end up with a single differential equation in terms of a single dependent variable that describes the motion of the system. Here in this problem, we want our EOM to be in terms of x(t).
Recall the following four-step plan outline in the lecture book and discussed in lecture:
Step 1: FBDs
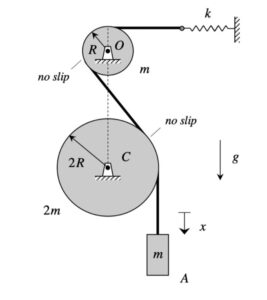
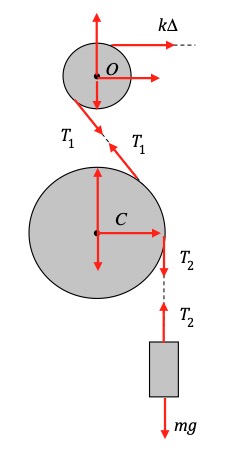
Draw individual free body diagrams for the pulley, disk and block A. Take note that the tension in the cable is NOT constant throughout its length. That is, the tension in each section of the cable needs to be represented by a different symbol. Consider the FBDs that follow. In these FBDs, Δ represents the amount of stretch in the spring.
Step 2: Kinetics (Newton/Euler)
Write down the Newton/Euler equations for the pulley, disk and block based on your FBDs above.
Step 3: Kinematics
Note that the speed of every point on the cable is the same since the cable does not stretch or go slack. Use this to relate the angular accelerations of the pulley and disk to the acceleration of the block. As confirmed by the animation above, the angular rotations of the disk and the pulley are NOT the same, in either magnitude or direction. Also, since the cable does not stretch, the amount of stretch in the spring is the same as the displacement of the block, x.
Step 4: EOM
Combine your Newton/Euler equations along with your kinematics to arrive at a single differential equation in terms of the dependent variable x.
Any questions?