Projects
MOTHERSHIP - A Serpentine Tread/Limb Hydrid Marsupial Robot
|
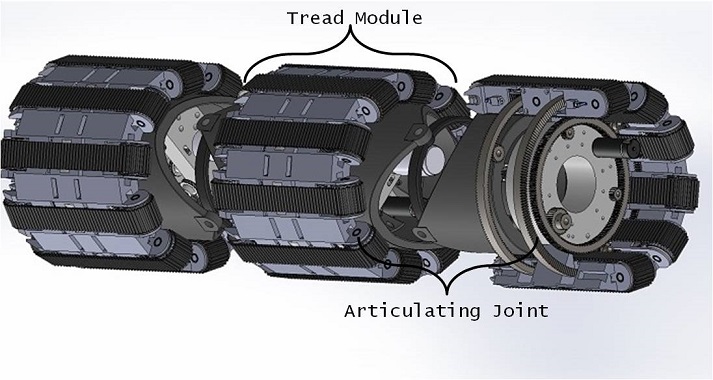
MOTHERSHIP is a tread/limb hybrid robot that uses treads as the primary mode of locomotion, augmented by active limb-like joints that articulate the discrete tread modules. The tread modules are then connected in a serpentine configuration by these limb-like joints so there is a “head” and a “tail.” What is novel about MOTHERSHIP is the 2-D tread modules we have developed. Each tread module can move longitudinally along the tread direction, like a bulldozer, and also transversely, perpendicular to the tread direction. When connected in the serpentine configuration, the entire robot becomes holonomic, meaning it can instantaneously move in any direction. |
TerminatorBot ~ Under Construction
|
CRAWLER - Locomotion and Manipulation from a Single Mechanism. |
Water Hammer Actuation. |