Projects
ReFrESH - A Robotic Self-Adaptation Framework
|
|
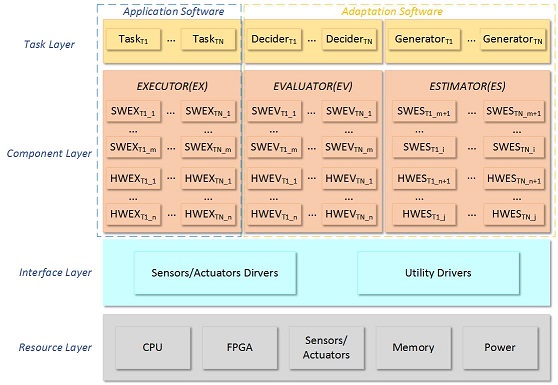
ReFrESH, is an acronym for REconfiguration Framework for Embedded systems both Software and Hardware. It is an infrastructure for dynamically monitoring, reasoning and maintaining the performance of a task solution for resource constrained multi-robot systems in the presence of faults and uncertainty. The goal of ReFrESH is to provide diagnosable and maintainable infrastructure support, built into a real-time operating system, to manage task performance in the presence of unexpected uncertainties. Specifically, the advantages of ReFrESH are that it: (1) integrates both task solution and robot sensors/actuators in a unifed framework to facilitate monitoring and reasoning of task performance; (2) enables a multi-robot system to dynamically synthesize new task solutions and to estimate the feasibility of each new task solution in the presence of critical performance degradation or unforeseen environment disturbance; and (3) provides a general mechanism to migrate task-related functionalities from one physical robot to the other networked most competent physical robot while maintaining the real-time operating system requirements. |
Dexterous Hexrotor - A Fully Actuated Nonparallel Hexrotor UAV
|
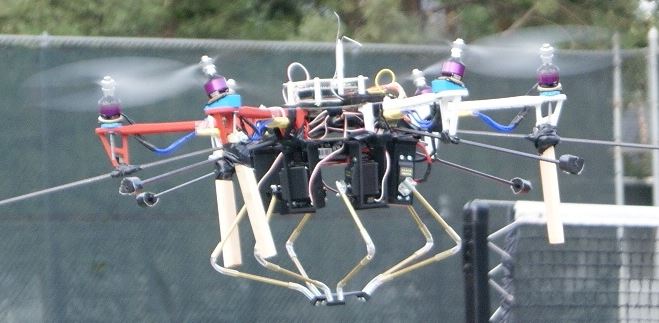
Dexterous Hexrotor is a six degree of freedom, truly holonomic aerial rotorcraft that provides force closure for controlled interaction with external structures. It is designed for aerial mobile manipulation tasks which is a burgeoning area of study in robotics. Dexterous Hexrotor is equipped with six nonparallel thrusters. Each thruster is rotated a Cant angle around the radius of the frame and the six thrusters are arranged in three planes. So in-plane components of thruster vectors and six independent controlled degrees of freedom in force/torque space result while still maintaining a symmetric basis of vectors. With a lightweight Stewart-Gough platform hosted by Dexterous Hexrotor, a macro/micro aerial mobile manipulation system is developed to investigate how much a fully actuated platform can improve the precision of position keeping and reduce the complexity of attitude control while performing manipulation tasks. |
|
MOTHERSHIP - A Serpentine Tread/Limb Hydrid Marsupial Robot
|
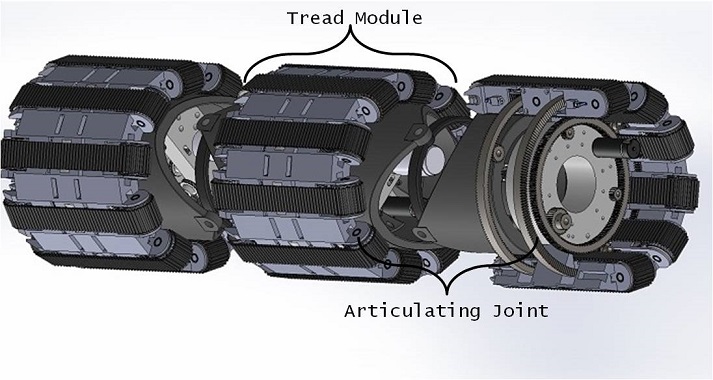
MOTHERSHIP is a tread/limb hybrid robot that uses treads as the primary mode of locomotion, augmented by active limb-like joints that articulate the discrete tread modules. The tread modules are then connected in a serpentine configuration by these limb-like joints so there is a “head” and a “tail.” What is novel about MOTHERSHIP is the 2-D tread modules we have developed. Each tread module can move longitudinally along the tread direction, like a bulldozer, and also transversely, perpendicular to the tread direction. When connected in the serpentine configuration, the entire robot becomes holonomic, meaning it can instantaneously move in any direction. |
RF Mapping for Communication Connectivity Maintenance in Robotic Ad-Hoc Networks
|
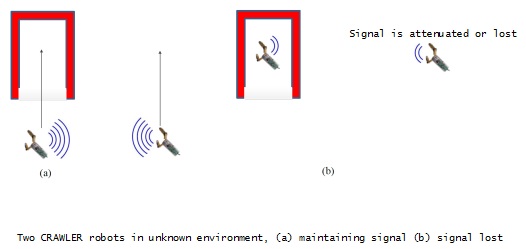
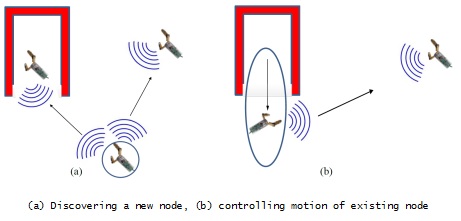
Connectivity maintenance is essential for effective and efficient mobile robot team operations especially in robotic ad-hoc networks, in which both transmitting and receiving robots are moving in adverse RF environments. Our work focuses on developing a method for robot communication connectivity maintenance based on signal strength gradient estimation augmented with radio frequency (RF) environment recognition (RF Mapping). The gradient descent and RF environment recognition attempts are combined into a motion control algorithm in a way that maintains connectivity among mobile robots, in the presence of localized RF obstacles. The RF environment recognition method utilizes hidden Markov models (HMMs) to categorize “RF shadows” into a set of RF obstacle primitives from partial information. The HMM results guide the robots to determine whether continuing the current trajectory to avoid the RF obstacle shadow, or hill climbing the robots back to favorable strong signal strength positions. Therefore, the motion control algorithm utilizes HMM results through RF recognition method augmented with the gradient estimation to determine the robot movement direction for achieving connectivity maintenance. The numerical simulation demonstrates that RF environment recognition, gradient estimation and motion control algorithm results are capable of maintaining robots motion control and connectivity maintenance. |
|
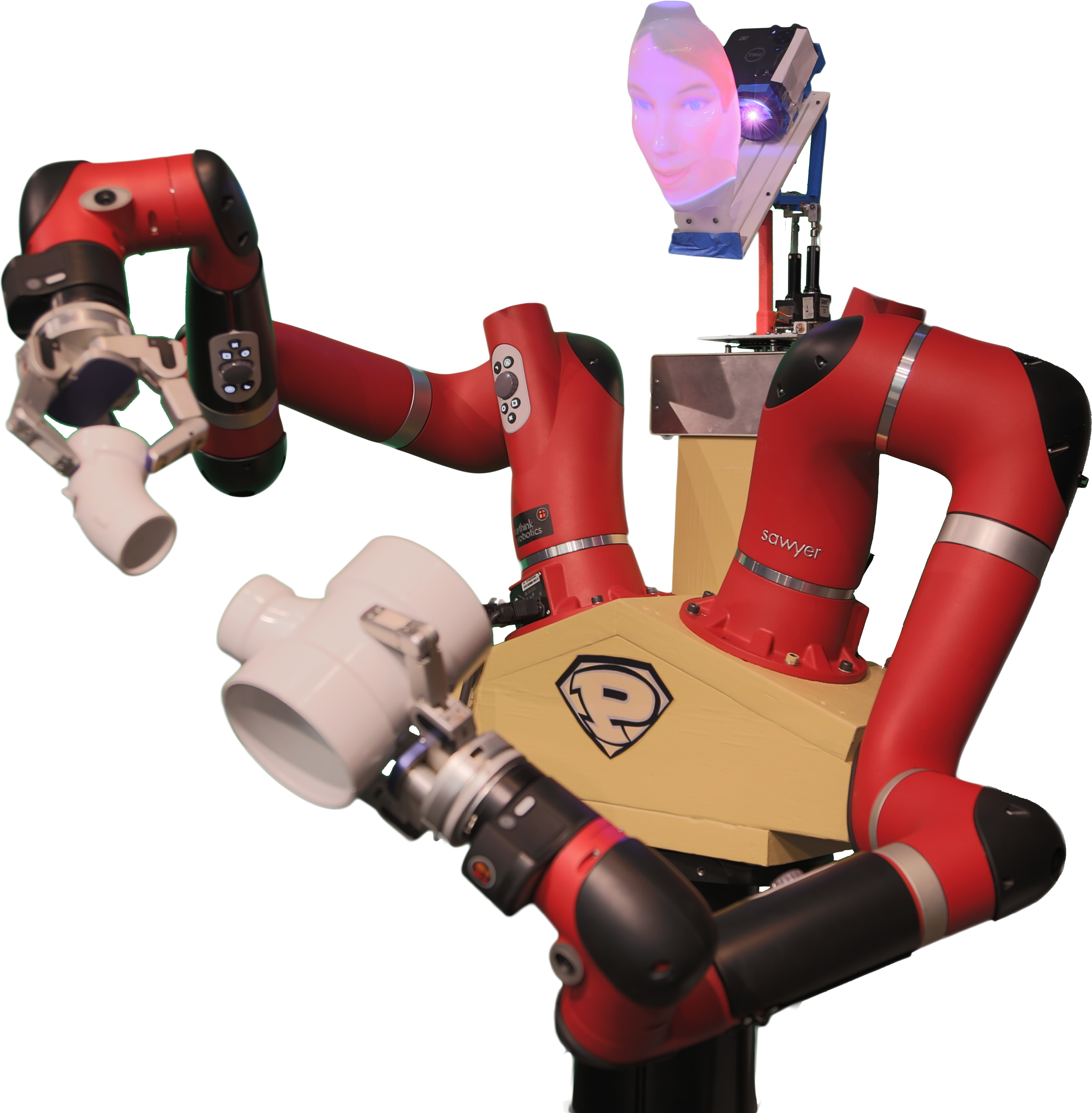
SuperBaxter - Gesture-Based Programming
|
Gesture-Based Programming (GBP) is a form of programming by human demonstration. The process begins by observing a human demonstrate the task to be programmed. Observation of the human's hand and fingertips is achieved through a sensorized glove with special tactile fingertips. The modular glove system senses hand pose, finger joint angles, and fingertip contact conditions. Objects in the environment are sensed with computer vision while a speech recognition system extracts "articulatory gestures." Primitive gesture classes are extracted from the raw sensor information and passed on to a gesture interpretation network. The agents in this network extract the demonstrator's intentions based upon the knowledge they have previously stored in the system's skill library from prior demonstrations. Like a self-aware human trainee, the system is able to generate an abstraction of the demonstrated task, mapped onto its own skills. In other words, the system is not merely remembering everything the human does, but is trying to understand -- within its scope of expertise -- the subtasks the human is performing ("gesturing"). These primitive capabilities in the skill base take the form of encapsulated expertise agents -- semi-autonomous agents that encode sensorimotor primitives and low-level skills for later execution. |
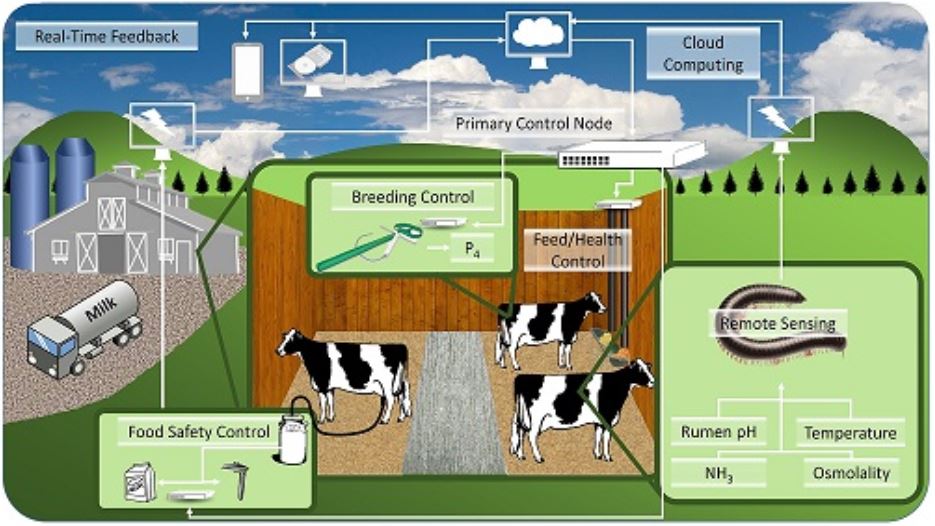
Sustainable Precision Animal Agriculture
|
The Collaborative Robotics Lab is engaged in a variety of projects investigating the sustainability, safety, efficiency, and productivity of animal agriculture and its impacts on global health and well-being. Through support from the National Science Foundation, US Department of Agriculture, NSF RoSe-HuB Center, and supporting companies and through collaborations with ECE, ME, Animal Science, Penn State University, and Virginia Tech, we are exploring the farm ecosystem and its far-reaching impacts on global climate, the soil microbiome, water and land use, and the economy of the family farm. |
|