Abbaraju Praveen
 |
Education: Ph.D. candidate (Robotics) |
Current Research:
Research Interests |
Control systems, Dynamics, Aerial mobile manipulation, Real-time systems, Distributed Computing, Soft Robots, Subterranean Robots, internet of things. |
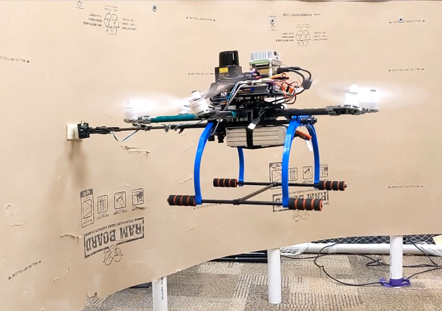
Aerial Mobile ManipulationMultirotor UAVs are being widely employed for periodic inspections of large-scale industrial facilities to protect workers from hazardous conditions such as precarious heights and toxic chemicals. This often requires physical interaction with the environment for sampling or cleaning operations. However, physical interactions with the environment requires the UAV to withstand external disturbances, including interaction forces and wind disturbances. Design choice and control for physical interactions are significant to ensure successful operations. The Physical interaction control is required to adapt to variations in the structures while exerting force signatures. I investigate the suitability of various UAV designs using quantifiable metrics and proposed hybrid physical interaction control for steady interactions.
|

|
Publications:
- P. Abbaraju, U. Kaur, H. McCarthy, and R. Voyles, “Clutter Slices Approach for Identification-on-the-fly of Indoor Spaces,” in 2021 PRAConBE Workshop, IEEE International Conference on Pattern Recognition (ICPR), Jan 2021.
- P. Abbaraju, M. Xin, Y. Huang, and R. Voyles, “Autonomous Physical Interaction of Exhaust Shafts and Smokestacks Using a Fully-Actuated UAV,” in 2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Nov 2020.
- P. Abbaraju, M. Xin, H. Manoj, V. Venkatesh, M. Rastgaar, and R. Voyles, “Inspection-on-the-fly using Hybrid Physical Interaction Control for Aerial Manipulators,” in 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2020.
- P. Abbaraju, H. Yang, H. Jang, and R. Voyles, “Aerial Mobile Manipulator System to Enable Dexterous Manipulations with Increased Precision,” in 2019 IEEE ICRA workshop on High Accuracy Mobile Manipulation in Challenging Environments , May 2019.
- P. Abbaraju, R. Voyles, ”Sensing and Sampling of Trace Contaminations by a Dexterous Hexrotor UAV at Nuclear Facilities-18600”, Proceedings of WM2018 Symposium, March 18–22, Phoenix, Arizona, USA.
- T. Soratana, M. Balakuntala, P. Abbaraju, R. Voyles, J. Wachs and M. Mahoor, ” Glovebox Handling of High-Consequence Materials with Super Baxter and Gesture-Based Programming-18598”, Proceedings of WM2018 Symposium, March 18–22, Phoenix, Arizona, USA.
- G. Jiang, R. Voyles, D. Cappelleri, D. McArthur, S. Mou, A. Yertay, R. Bean, P. Abbaraju, A. Chowdhury, ”Purpose-Built UAVs for Physical Sampling of Trace Contamination at the Portsmouth Gaseous Diffusion Plant-17331”, Proceedings of WM2017 Symposium, March 5–9, Phoenix, Arizona, USA.
- R. Voyles, P. Abbaraju, H. Choset and A. Ansari, “Novel Serpentine Robot Combinations for Inspection in Hard-to-Reach Areas of Damaged or Decommissioned Structures-17335”, Proceedings of WM2017 Symposium, March 5–9, Phoenix, Arizona, USA.
- R. Voyles, P. Abbaraju, D. Leon-Salas, S. Sanjana, and A. Lakshmanan, “Soft Robotic Skin from Intelligent Meta-Materials. In Advancements in Automation, Robotics and Sensing (pp. 121-137). Springer 2016, Singapore.