Xiaoyin Zheng
 |
Education: M.S. in Robotics |
Current Research:
Research Interests |
Control systems, Dynamics simulation, Battery management, System control, Autonomous drive , Reinforcement learning. |
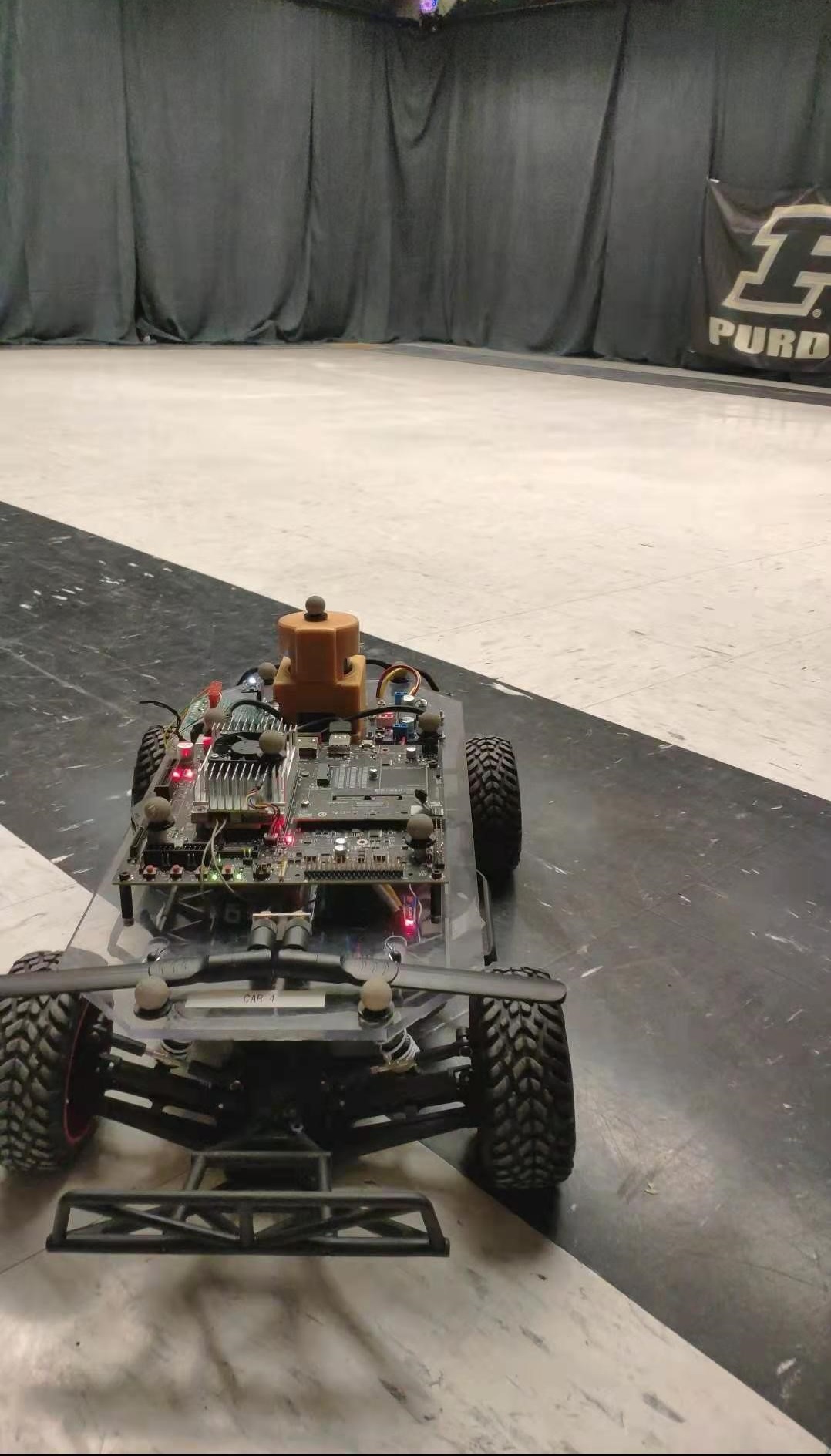
Autonomous High-speed Drift Beyond Stability Limits
Using reinforcement learning approach to optimize the race car performance under extreme conditions.
|
|
Publications:
- L. Haoran, L. Liangdong, Z. Xiaoyin and S. Mingxuan, "Lithium Battery SOC Estimation Based on Extended Kalman Filtering Algorithm," 2018 IEEE 4th International Conference on Control Science and Systems Engineering (ICCSSE), Wuhan, China, 2018, pp. 231-235, doi: 10.1109/CCSSE.2018.8724766.