 Motor control is a young research field in biology. It is defined as the search for natural laws that describe how an animal’s central nervous system interacts with its body and its environment to produce coordinated, purposeful movement. This field borrows heavily from psychology, neuromuscular physiology, control theory, dynamical systems, optimization theory, biomechanics, information theory, computational neuroscience, and cognitive science. Motor control is typically studied at the muscular or the behavioral level. Typical measurements are muscle activations, forces and displacements.
Motor control is a young research field in biology. It is defined as the search for natural laws that describe how an animal’s central nervous system interacts with its body and its environment to produce coordinated, purposeful movement. This field borrows heavily from psychology, neuromuscular physiology, control theory, dynamical systems, optimization theory, biomechanics, information theory, computational neuroscience, and cognitive science. Motor control is typically studied at the muscular or the behavioral level. Typical measurements are muscle activations, forces and displacements.
Our group is currently involved in the motor control of bipedal balance, reaching/pointing, and prehensile behaviors in health, aging, and disease.

Gymnasts exploit the mechanical properties of their bodies to achieve remarkable feats. Divers enter a fetal position while in the air to increase the number of somersaults, but then stretch out to enter the water with a minimal splash. The divers train to exploit the law of conservation of angular momentum to maximize their performance. […] Read More
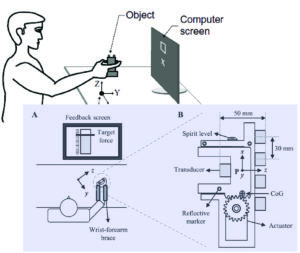
Anvesh Naik, a PhD student with Dr. Ambike, found that healthy young adults alter their grip on an object up to 5 seconds before moving the object. This finding could reflect the capacity and flexibility of control of a healthy system. How would the system of an older individual fare in comparison? Would a deficit […] Read More

Anvesh Naik and Mitchell Tillman, both students of Dr. Satya Ambike, presented their work on human prehension behavior at the Society of Neuroscience conference held at Chicago in October 2019. SfN is the largest conference in this field, with close to 30,000 scientists and students from all over the world in attendance. Anvesh Naik, a […] Read More
In addition to Fitts’ Law, we (Schmidt, Zelaznik, Hawkins, Frank & Quinn, 1979) proposed a linear speed-accuracy trade-off. These two laws appear to be fundamentally different. We have begun a series of experiments in an attempt to unify these two relations. PI – Dr. Howard Zelaznik Collaborators – Dr. Jeffery Haddad Students – Josh […] Read More
Fitts’ Law (JEP, 1954) is the most robust relation in all of motor performance, relating movement time, T, movement distance, D, and target precision, W, in the now famous T = a + bLog2 (2D/W). This law characterizes averaged group behavior. We have asked whether this relation can be used to classify individuals as reliably […] Read More
Individuals with Parkinson’s disease often fall while performing activities requiring simultaneous cognitively-demanding tasks (e.g. walking while talking). Falling reduces independence, mobility, and quality of life. Current behavioral interventions do not improve balance while performing cognitively-demanding tasks. We developed a new intervention, COgnitive-based BALance Training (COBALT) to simultaneously train balance and cognition, simulating the demands inherent […] Read More
In order to successfully complete many routine tasks, individuals must have the proper integration between posture and manual control. This means individuals must adopt body configurations, orientations, and movements that allow them to maintain stability while successfully performing a manual task. In a series of studies, we have examined how the integration between posture and […] Read More
This study compared the performance of the Microsoft Kinect, a widely-available and inexpensive video-game peripheral used for active gaming, to the performance of a research-grade motion capture system for measuring the coordination of rhythmic manual movements. Such movements are typically used in characterizing motor deficits in children and pathological populations. Results suggest that Kinect accurately […] Read More

