
January 11, 2006
Engineers create mathematical method to design better robots, structures
WEST LAFAYETTE, Ind. – Mechanical and civil engineers have created a new mathematical method to design better structures, machines and versatile computer-controlled robots called "robot manipulators."

|
{kind=link}
Civil engineers design structures such as buildings and bridges using mathematical formulas, or theorems, that deal with the science of statics. Mechanical engineers designing robots, machinery and mechanisms use their own set of theorems dealing with kinematics, or the science of motion.
Now, a mechanical engineer at Purdue University and a civil engineer at Tel Aviv University in Israel have created new theorems that improve the design process by combining the mathematics of both kinematics and statics.
"These new theorems represent a common language and provide an understanding of what we call the duality between kinematics and statics," said Gordon R. Pennock, a Purdue associate professor of mechanical engineering. "The practical result is that engineers can use this knowledge to design better structures and better machines."
The research is detailed in a technical paper that will appear in the January issue of the Journal of Mechanical Design, published by the American Society of Mechanical Engineers. The paper was written by Pennock and Offer Shai, a civil engineer in the Department of Mechanics, Materials and Systems at Tel Aviv University.
The dual theorems could enable civil engineers to design structures that better withstand the forces and "moments," or torque, associated with motions such as those caused by earthquakes, perhaps at less expense than today's designs.
"Today, if you want to design a sturdy structure that does not become unstable, you have several choices," Pennock said. "You can use the highest quality material and add many supporting members. Having a dual language provides an alternative to the current approach by giving the designer a better understanding of the physics associated with the stability of the structure. This, in turn, should enable the designer to create a safer structure at or below the cost of current designs."
The dual theorems could also be incorporated into design software, resulting in more intelligent programs that both mechanical and civil engineers could use to create better machines and structures, Pennock said.
"We are trying to help the designer of structures and the designer of mechanisms to predict potentially bad designs," he said.
The mathematics associated with kinematics must factor in the effects of velocity and acceleration resulting from motion. Static structures, on the other hand, are inherently strong in one position but could become weak if that position changes due to unpredictable motion. Combining the mathematics of kinematics and statics provides the best of both worlds by enabling engineers to better design structures that can withstand the "loads" resulting from motion-related forces.
"Civil engineers understand the mathematics of forces and moments, and mechanical engineers understand the mathematics of velocity and acceleration," Pennock said. "We have shown that these concepts are, in fact, analogous. This duality was not fully appreciated until we presented several theorems and documented the proofs of these theorems."
The theorems offer promise in creating a new class of "multiple-platform robots" that maintain their strength even when damaged or otherwise compromised.
So-called robot manipulators currently in use in manufacturing are controlled by sophisticated computer software and can perform a range of tasks.
"Current robots, however, have a single platform, but we showed how the dual theorems will enable engineers to design more functional robots with more than one platform," Pennock said.
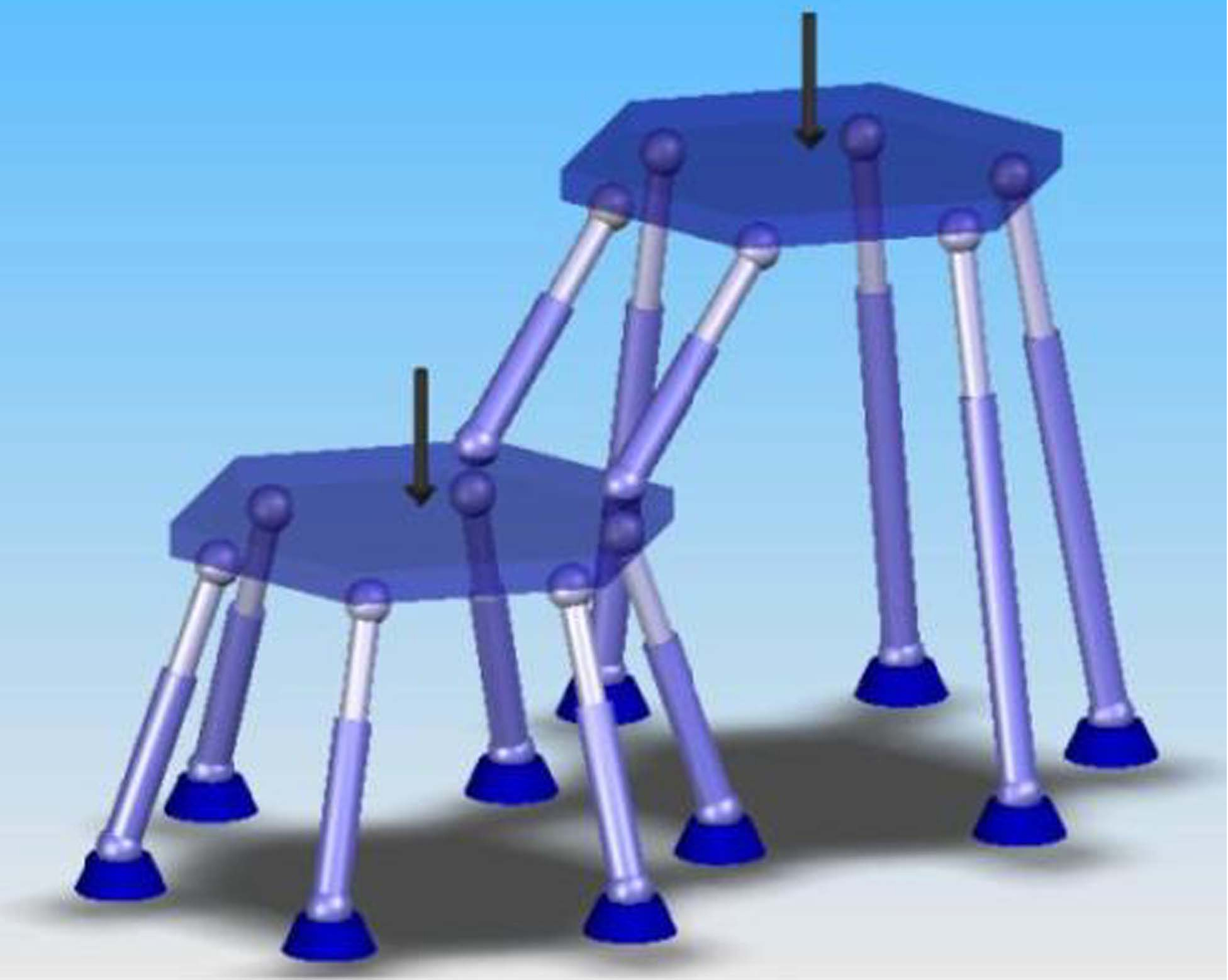
One example is a spherical robot that contains three curved plates nested inside each other. Such a design might be useful in space applications for compact structures that expand into larger structures, such as antennas. Another example is a 12-legged robot that has two flat platforms: a lower platform that has six legs standing on the ground and an upper platform that is connected to the ground by four legs and to the lower platform by two legs.
"In robotics, you want the payload to have at least six degrees of freedom, like you have with your arm and shoulder, allowing your arm to move up and down, side to side, and forward and backward," Pennock said. "But what if something happens to impair the motion of a robot so that it can no longer use all of its joints, and it gets locked in a position that makes it vulnerable to collapse?
"All of a sudden, you realize that the robot is not sufficiently stable to support the payload because all of the joints do not function correctly. If you do not plan for such a situation, then you could end up spending an excessive amount of time and money to design a robot that may not be practical. So you want to include the mathematics of statics in the design to ensure that your multiple-platform robot remains stable in a variety of configurations."
The dual theorems should also enable engineers to design better automotive transmissions, and findings related to the potential transmission applications will be detailed in another research paper to be published by American Society of Mechanical Engineers later this year.
Shai and Pennock received the A. T. Yang Memorial Award for their prize-winning paper, "The Duality between Kinematics and Statics," which was presented at the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, and the 29th ASME Mechanisms and Robotics Conference, all in September 2005.
Writer: Emil Venere, (765) 494-4709, venere@purdue.edu
Sources: Gordon R. Pennock, (765) 494-5728, pennock@purdue.edu
Offer Shai, shai@eng.tau.ac.il
Purdue News Service: (765) 494-2096; purduenews@purdue.edu
Note to Journalists: An electronic copy of the research paper is available from Emil Venere, (765) 494-4709, venere@purdue.edu. A copy of an award-winning paper about the research, which was presented in September 2005, also is available by contacting Venere or Gordon Pennock, (765) 494-5728, pennock@purdue.edu.
IMAGE CAPTION:
This image shows a "multiple-platform" robot design that illustrates the practical use of "dual theorems" that combine the mathematics of civil and mechanical engineering, promising to enable the creation of better structures, robot manipulators and machines. Civil engineers design structures such as buildings and bridges using mathematical formulas, or theorems, that deal with the science of statics. Mechanical engineers designing mechanisms, robots and machinery use their own set of theorems dealing with kinematics, or the science of motion. Now, a mechanical engineer at Purdue University and a civil engineer at Tel Aviv University in Israel have created new theorems that combine the mathematics of both kinematics and statics. The dual theorems could enable civil engineers to design structures that better withstand the forces and "moments" associated with motions, such as those caused by earthquakes, perhaps at less expense than today's designs. The theorems also could be used to design a new class of multiple-platform robots that maintain their strength even when damaged or otherwise compromised. (Purdue University School of Mechanical Engineering)
A publication-quality photo is available at https://www.purdue.edu/uns/images/+2006/pennock-robot.jpg
{kind=link}
Gordon R. Pennock, School of Mechanical Engineering, Purdue University
This paper is a study of the duality between the statics of a variety of structures and the kinematics of mechanisms. To provide insight into this duality, two new graph representations are introduced: namely, the flow line graph representation and the potential line graph representation. The paper also discusses the duality that exists between these two representations. Then the duality between a static pillar system and a planar linkage is investigated by using the flow line graph representation for the pillar system and the potential line graph representation for the linkage. A compound planetary gear train is shown to be dual to the special case of a statically determinate beam and the duality between a serial robot and a platform-type robot, such as the Stewart platform, is explained. To show that the approach presented here can also be applied to more general robotic manipulators, the paper includes a two-platform robot and the dual spatial linkage. The dual transformation is then used to check the stability of a static system and the stationary, or locked, positions of a linkage. The paper shows that two novel platform systems, comprised of concentric spherical platforms inter-connected by rigid rods, are dual to a spherical six-bar linkage. The dual transformation, as presented in this paper, does not require the formulation and solution of the governing equations of the system under investigation. This is an original contribution to the literature and provides an alternative technique to the synthesis of structures and mechanisms. To simplify the design process, the synthesis problem can be transformed from the given system to the dual system in a straightforward manner.
Keywords: statics, kinematics, duality, graph representations, static pillar systems, beams, planetary gear trains, serial robots, platform-type robots, unstable truss, dead-center positions, synthesis.
To the News Service home page