
Origami-inspired design method merges engineering, art
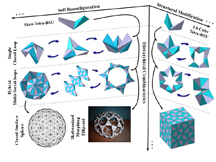
This graphic illustrates the creation of morphing robot-like mechanisms and shape-shifting sculptures from a single sheet of paper in a method reminiscent of origami, the Japanese art of paper folding. The robotic and artistic designs are made up of building blocks called "basic structural units," or BSUs. Each BSU contains a pair of polyhedral components joined by a common creased hinge, and many BSUs are linked together to create comples structures. (Purdue University image)
WEST LAFAYETTE, Ind. – Researchers have shown how to create morphing mechanisms, robotic forms and shape-shifting sculptures from a single sheet of paper in a method reminiscent of origami, the Japanese art of paper folding.
The new method, called Kaleidogami, uses computational algorithms and tools to create precisely folded structures.
"The approach represents new geometric algorithms and methods to create works of kinetic, or moving, art," said Karthik Ramani, Purdue University's Donald W. Feddersen Professor of Mechanical Engineering. "Scientists and engineers are often motivated by the beauty of artistic representations while artists and architectural designers want to harness concepts from science, technology, engineering and mathematics. One of our aims is to provide a new geometry-inspired art form, reconfigurable structures, in the emerging field of kinetic art."
Whereas Kaleidogami focuses on artistic representations of sculptural structures, the researchers also have created a variation called Kinetogami to create foldable robotlike mechanisms. They envision robots that can "reconfigure" themselves to suit the terrain, morphing from a slithering inchworm motion to a six-legged walking gait.
"The hexapod robotic form we proposed is able to adjust its body frequently in an adaptive manner to provide a wide range of gaits: lying down, flipping itself up, rising, squatting, squirming and slithering," said mechanical engineering doctoral student Wei Gao. "The folded designs have an elegant simplicity, while using paper and cardboardlike materials that are flat is practical because they are very inexpensive and lightweight."
Findings about the concept are detailed in a research paper being presented during the Shape Modeling International 2012 conference on May 22-25 in College Station, Texas. Other findings specifically about the robotlike mechanisms with Kinetogami will be presented during the American Society of Mechanical Engineers International Design Engineering Technical Conferences on Aug. 12-15 in Chicago.
The method also could be used in architecture to design features including vaulted ceilings, skylights and retractable roofs.
The researchers have created paper models of the designs and are looking into using a variety of systems to power the structures.
"This is a proof of concept," said Raymond Cipra, a professor of mechanical engineering and a co-author of the second research paper.
The robotic and artistic designs are made up of building blocks called "basic structural units," or BSUs. Each BSU contains a pair of polyhedral components joined by a common creased hinge, and many BSUs are linked together to create complex structures.
"Whereas traditional origami rules were committed such as when folding a square paper sheet without cutting or gluing, we create our structures by folding as well as making cuts to a single piece of flat paperlike materials," Gao said.
Such robots, toys and artwork would be ideal for shipping because they could be transported as a flat sheet and later changed into their three-dimensional structures.
"It also gives rise to lots of interesting educational applications," Gao said. "For instance, you can help students learn spatial geometry, study kinematics, mechanics and test stiffness and load carrying capacity while at the same time having fun."
The researchers plan to explore collaborations with museums to incorporate kinetic art in exhibits.
Writer: Emil Venere, 765-494-4709, venere@purdue.edu
Sources: Karthik Ramani, 765-494-5725, ramani@purdue.edu
Wei Gao, gao51@purdue.edu
Raymond Cipra, 765-494-5724, cipra@purdue.edu
Note to Journalists: A copy of the research paper is available by contacting Emil Venere at 765-494-4709, venere@purdue.edu
ABSTRACT
Kaleidogami™: Multi-Primitive Reconfigurable Artistic Structures
Wei Gao, Karthik Ramani *
School of Mechanical Engineering
* School of Electrical and Computer Engineering (by Courtesy)
Purdue University
In this paper we present our initial prototypical explorations as well as the associated transformative design concept called Kaleidogami™. This method is used for developing spatial objects that can be flattened, folded and reconfigured. We develop the metaphor and concept for a basic structural unit (BSU) such as using tetrahedral, cuboidal, prismatic, and pyramidal units to enable new forms of 3-D folding. The fabrication is done using a single flat sheet of foldable substrate in 2-D. We explore the diversity of structural polyhedral sculptures and movable constructs in a hierarchical architecture. More artistic constructions are contextualized with a Kaleido-Tangram like integration.
ABSTRACT
Reconfigurable Foldable Spatial Mechanisms and Robotic Forms Inspired by Kinetogami
Wei Gao, Karthik Ramani *, Raymond J. Cipra
School of Mechanical Engineering
* School of Electrical and Computer Engineering (by Courtesy)
Purdue University
In recent times, Origami has received an increasing research interest because of its capability to produce foldable tessellations and structures. This paper describes a new modular tetrahedral representation called "Kinetogami." We embed the cuts and joining patterns into the crease pattern and create folded hinges across basic structural units (BSU), typically not done in origami. We demonstrate sets of explicit 2-D fabrication layouts and construction rules in order to fold reconfigurable structures and mechanisms in 3-D by using a single flat paper sheet. The structural and combinatorial characteristics of Kinetogamic derivatives are further explored in a hierarchical manner. Inspired by Kinetogami, we design a family of multi-limbed tetrahedral robotic form that reconfigures and adapts. The kinematic properties of individual limbs are investigated and multiple gaits involving flipping, squatting/rising, squirming and slithering are synthesized for a representative hexapod robot. Our newly developed folding design paradigm provides affordances for a novel generation of robotic motion actuation and transformable reconfiguration.